论文题目
Efficient K-Nearest Neighbor Graph Construction for Generic Similarity Measures
相关信息
作者与单位
Wei Dong(wdong@cs.princeton.edu);
Moses Charikar(moses@cs.princeton.edu);
Kai Li(li@cs.princeton.edu).
Department of Computer Science, Princeton University
出处与时间
In Proceedings of the 20th international conference on World wide web; 2011
作者拟解决的主要问题
K近邻图的构建在很多基于Web的应用上是一个重要的操作,比如协同过滤(基于用户的邻居作推荐)、相似性搜索等。一个有效地构建方法将使K近邻图的应用更加广泛。
暴力构建K近邻图的时间复杂度为$O(n^2)$,为了能更高效的构建K近邻图,现存的工作扩展性都不太好,而且一般都特定于具体的相似性度量。
有效的K近邻图构建仍然是一个开放的问题,解决该问题的已知方案中没有一个是通用、有效和可扩展的。因此,本文提出了NN-Descent方法,该方法具有以下优点:
- 通用。适用于任意的相似性度量准则。
可扩展。随着数据集尺寸的增加,Recall仅有很小的下降。由于对每一个数据点的局部信息进行操作,因此适用于分布式计算环境(MapReduce).
节省空间。整个构建过程仅涉及到一种数据结构——近邻图。
- 快速、精确。百分之几的相似性比较便可实现90%以上的召回率。
- 容易实施。主要代码不超过200行(C++)。
论文主要研究内容
如何有效地构建一个K近邻图,具体如下:
- 适用任意相似性度量的K近邻图构建方法。
- 在较短的时间内快速构建K近邻图的方法。
- 构建一个在其上能快速、精确执行搜索的K近邻图。
- 适用于MapReduce框架的K近邻图构建方案。
论文使用的方法
抽象描述注解
$V$表示数据集,数据集尺寸为$N=|V|$,相似性度量$\sigma$:$V \times V \rightarrow R$。$\forall v \in V$,$B_K(v)$表示$v$的$K$个最近邻,$R_K(v)= \lbrace u \in V | v \in B_K(u) \rbrace$表示$v$的反向K个最近邻。$B[v]$和$R[v]$分别表示$B_K(v)$和$R_K(v)$的近似。$\overline{B}[v]=B[v] \cup R[v]$表示$v$的一般邻居。
当在$V$上的度量方式为距离度量时,即$d$:$V \times V \rightarrow [0,\ +\infty]$。$\forall r \in [0,\ +\infty]$,以$v$为球心的r-球定义为:$B_r(v)=\lbrace u \in V | d(u, \ v) \leq r\rbrace$。
如果$\exists c$满足:
$$
|B_{2r}(v)| \leq c|B_{r}(v)|, \ \forall v \in V \tag{1}
$$
则称度量空间V增长受限,$c$是增长常量。
基础算法注解
基本思想:邻居的邻居更可能是邻居。
理论推导
我们可以从$V$中每一个点的现有的近似K近邻出发,通过探索该点邻居的邻居(在当前近似K近邻中)而不断完善该点的K近邻。换句话说,可从粗略的K近邻图出发通过改进而不断完善它。对这一观点的量化表达如下:
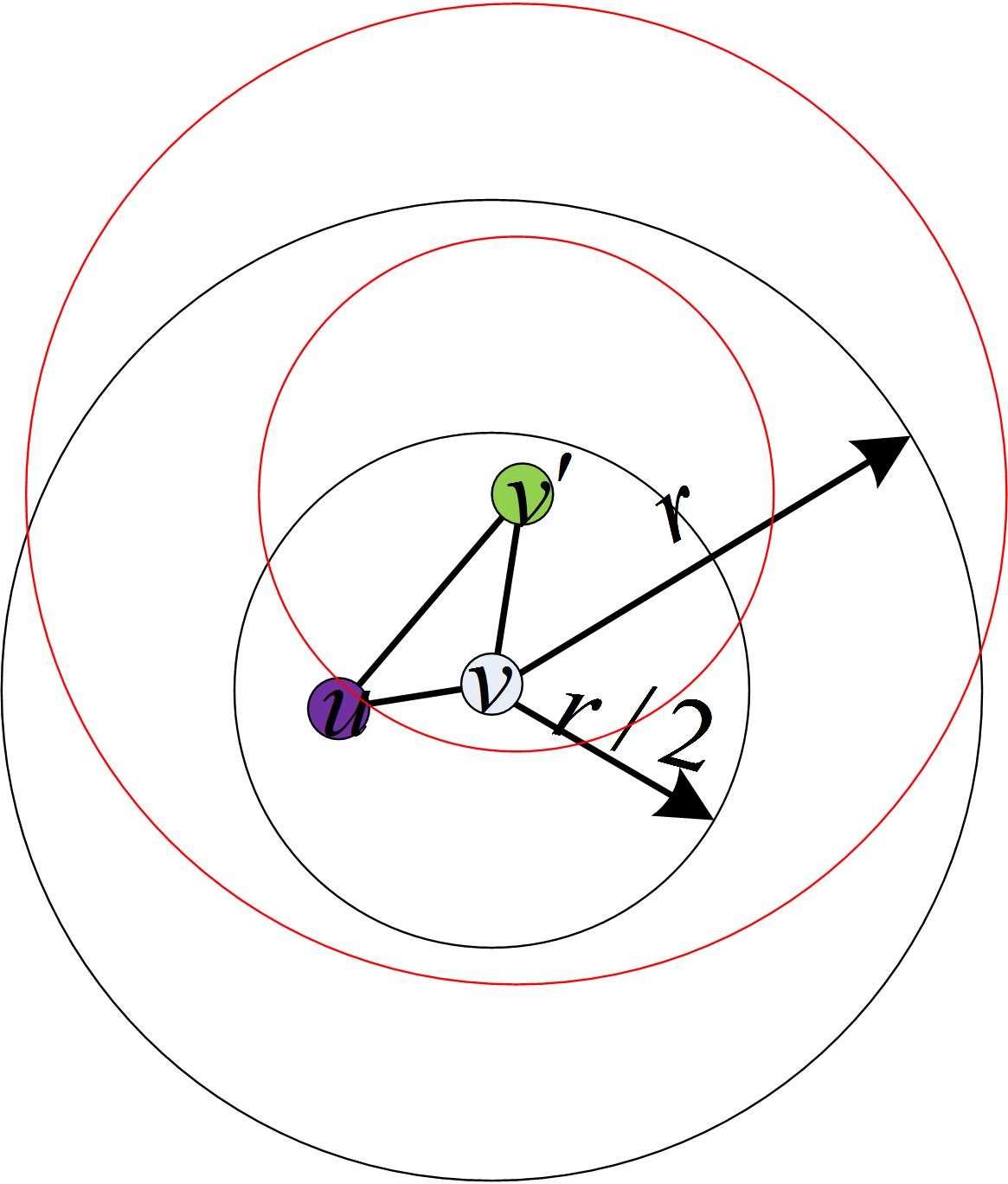
让$K=c^3$(后面公式推导要用到,$K$取此值是方便推导),假定已有的近似K近邻图(可以随机给每个点选邻居构建,也可通过其它数据结构辅助构建,如哈希,树等)为$B$。$\forall v \in V$,$B^\prime[v]=\bigcup _{v^\prime \in B[v]} B[v^\prime]$表示$v$所有邻居的邻居集合,它也是在完善$v$的K近邻时的候选点集。当B的精度比较高时(迭代完善了一定次数或通过某种更好的方式初始化B),高到什么程度呢?就是给定一个固定的半径$r$,对$\forall v \in V$,$B[v]$包含的K个邻居均匀地分布在$B_r(v)$中。这样的话,当各事件相互独立且$K<< |B_{r/2}(v)|$时,$B^\prime [v]$很可能包含在$B_{r/2}(v)$中的K个邻居。换句话说,对$\forall v \in V$,通过探索$B^\prime [v]$来使$v$到它的近似K近邻的距离减半。
对$B_{r/2}(v)$中的一点$u$,要从$B^\prime[v]$里面找到,则至少存在一点$v^\prime$,使得$v^\prime \in B[v]$,且$u \in B[v^\prime]$。接下来,我们只需要找满足上述条件的$v^\prime$即可。而若$v^\prime \in B_{r/2}(v)$,则有以下几个不等式成立:
- $v^\prime \in B_r(v)$,因此,$P\lbrace v^\prime \in B[v]\rbrace \geq K/|B_r(v)|$,$P\lbrace v^\prime \in B[v]\rbrace$表示概率。注解:$v^\prime \in B_{r/2}(v)$,则$v^\prime \in B_r(v)$必然成立。若$v$的$K$个邻居都在$B_r(v)$中取的话,则一共有$C_{|B_r(v)|}^K$种情况,而$B_r(v)$中的一点不是$v$的邻居的情况有$C_{|B_r(v)|-1}^K$种,$B_r(v)$中的一点不是$v$的邻居的概率为$C_{|B_r(v)|-1}^K/C_{|B_r(v)|}^K$,即为$(|B_r(v)|-K)/|B_r(v)|$,因此$B_r(v)$中的一点是$v$的邻居的概率为$1-C_{|B_r(v)|-1}^K/C_{|B_r(v)|}^K$,即为$K/|B_r(v)|$。$B_{r/2}(v)$中的一点更可能是$v$的邻居,故$v^\prime$是$v$的邻居的概率大于等于$K/|B_r(v)|$。
- $d(u,\ v^\prime) \leq d(u, \ v) + d(v, \ v^\prime) \leq r$,因此,$P\lbrace u \in B[v^\prime]\rbrace \geq K/|B_r(v^\prime)|$。注解:由第一条推论可知,因此$B_r(v^\prime)$中的一点是$v^\prime$的邻居的概率为$K/|B_r(v^\prime)|$,而$u$与$v^\prime$的距离小于等于$r$,故$u$是$v^\prime$的邻居的概率大于等于$K/|B_r(v^\prime)|$。
- $|B_r(v)| \leq c|B_{r/2}(v)|$,且$|B_r(v^\prime)| \leq c|B_{r/2}(v^\prime)| \leq c|B_r(v)| \leq c^2|B_{r/2}(v)|$。注解:重点是$|B_{r/2}(v^\prime)| \leq |B_r(v)|$部分的推导,而此处可由图1明显推出。由于$v^\prime$在$v$的$r/2$-球中,$v^\prime$的$r/2$-球一定包含于$v$的$r$-球中。
由以上3个不等式和假定的各事件的独立性可得:
$$
P\lbrace v^\prime \in B[v] \land u \in B[v^\prime]\rbrace \geq K/|B_{r/2}(v)|^2 \tag{2}
$$
注解:上式其实就是1.与2.两个事件同时发生的概率再由3.式化简的结果。它的意义是,对于$B_{r/2}[v]$中的确定的点$v^\prime$,它既是$v$的邻居又是$u$的反向邻居的概率大于等于$K/|B_{r/2}(v)|^2$。
因此,当$v$的邻居从$B_{r/2}(v)$中取时,在$B_{r/2}(v)$中的一点$u$属于$v$的邻居的邻居的概率为:
$$
P\lbrace u \in B^\prime[v]\rbrace \geq 1-(1-K/|B_{r/2}(v)|^2)^{|B_{r/2(v)}|} \approx K/|B_{r/2(v)}| \tag{3}
$$
注解:先考虑$u$不是$v$的邻居的邻居的概率。此时,从$B_{r/2}(v)$中取出的一点设为$x$,$x$不是$v$的邻居或者$u$不是$x$的邻居,发生这种情况的概率由式(2)可得应为$1-K/|B_{r/2}(v)|^2$,$B_{r/2}(v)$中一共有$|B_{r/2}(v)|$个点,它们都不满足上述情况($x$不是$v$的邻居或者$u$不是$x$的邻居)的概率为:$(1-K/|B_{r/2}(v)|^2)^{|B_{r/2(v)}|}$,这便是$u$不是$v$的邻居的邻居的概率,从而$u$是$v$的邻居的邻居的概率为:$1-(1-K/|B_{r/2}(v)|^2)^{|B_{r/2(v)}|}$。下面对该式进行化简,由于$K<< |B_{r/2}(v)|$,因此$K/|B_{r/2}(v)|^2$是无穷小,化简过程用到一个重要极限:
$$
\lim_{x \rightarrow \infty}(1+\frac{1}{x})^x=e \tag{4}
$$
一个等价无穷小公式:
$$
e^x -1 \sim x
$$
整个数据集的直径设为$\Delta$,式(3)表明,只要我们取一个足够大的$K$(取决于增长因子$c$),即使我们从一个随机的K近邻图开始,通过探索每一个对象邻居的邻居,便可找到该对象的处于半径为$\Delta/2$的范围内的K个近邻。不断的迭代这一过程,每个对象的邻居距离该对象的距离会不断收缩,最终,构建一个高质量近似K近邻图。
伪代码
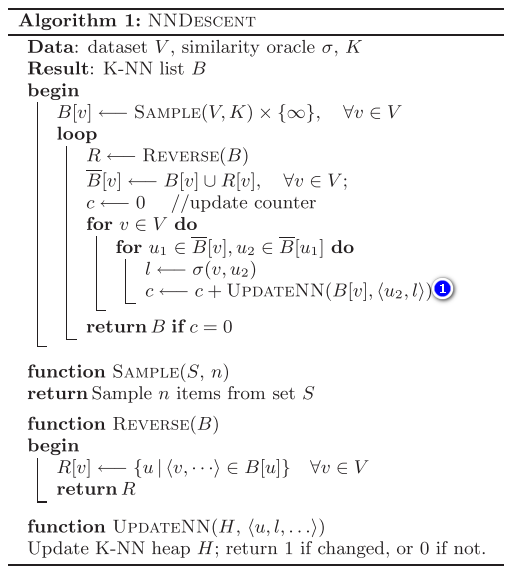
注解:(1)处为更新统计,如果某一个对象的K近邻列表更新了,$c$就会加1。算法1的终止条件为自然终止,即没有更新时($c=0$)终止。
改进算法注解
局部连接
让每一个对象探索它邻居的邻居的操作也可通过局部连接等价实现。局部连接可这样理解:给定一点$v$,它的邻居集为$\overline{B}[v]$,在$\overline{B}[v]$上的局部连接是计算每一对不同的$p$和$q$之间的相似性($p,q \in \overline{B}[v]$),并且根据此相似性更新$B[p]$与$B[q]$。通俗的将,局部连接就是每一个点介绍它的邻居去了解彼此。
局部连接能代替一个对象探索它邻居的邻居的操作吗?看下面的示例:
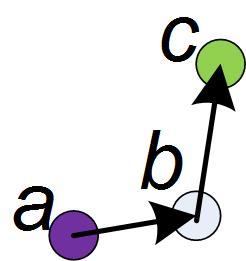
如图2所示,$b \in B_K(a)$,$c \in B_K(b)$。在算法1中,当探索到$a$时,我们需要比较$a$与$c$,当探索到$c$时,我们也需要比较$a$与$c$,这是冗余计算的一种情况,可通过索引编号的顺序来解决。同样地,$a$与$c$之间的比较可通过对$\overline{B}[b]$进行局部连接来实现。
局部连接实现起来很简单,那么它有什么好处呢?
- 增强了数据的局部性,使执行更有效。如果每一个对象的邻居的个数平均为$\overline{K}$,算法1每次迭代探索每一个对象的邻居的邻居时将接触到$\overline{K}^2$个点,而局部连接只需要接触$\overline{K}$个点。
- 单机实施时,提升了cache的命中率,从而加速了K近邻图的构建。分布式实施时,能减少机器之间数据的复制。
增量搜索
随着算法的执行,每一个对象的K近邻更新的幅度逐渐减小。而且,在某次迭代中参与比较的两个点,就更可能在之前的迭代中已经比较过了。这就造成冗余计算,而增量搜索就是要解决这个问题的。
- 给每一个点的K近邻列表中的每一个对象附加一个布尔标记,当一个新对象插入到该列表中的某个条目时,它的标记初始化为true。
- 只有当两个对象至少一个的标记为true,它们才进行局部连接。一个对象参与局部连接之后,它被标记为false(true变false,false还是false)。
采样
采样是为了解决以下两个问题:
- 局部连接的高成本。一次迭代,就算只考虑K近邻,时间复杂度为$K^2N$,如果再考虑反向近邻,时间复杂度更高。
- 冗余计算。两个点同时连接到多个不同对象,这两个点将比较多次。
使用采样来缓解这两个问题的具体方案如下:
- 邻居取样。局部连接之前,对用于局部连接的每一个对象,从标记为true的K近邻中取样$\rho K$个对象($\rho \in (0, 1]$)。每一次迭代,仅仅这些被取出的数据被标记为false。
- 反向邻居。只根据取样对象和标记为false的对象来构建反向邻居列表。对构建得的反向邻居列表再次取样。
- 在标记为true对象之间进行局部连接,以及在标记为true对象与标记为false对象之间进行局部连接。
因此,我们就可以通过取样率$\rho$来进行精度和速度的trade-off。
提前终止
一个很自然的终止标准是:某次迭代中,K近邻图不再被改善。实际上,开始迭代时,K近邻图能充分的更新,而随着迭代的进行,K近邻图更新的次数快速收缩,此时的迭代就显得意义不大了,考虑到迭代的计算成本,这些迭代其实没必要执行。为了解决这个问题,本文采取的方案是:在每次迭代中,统计所有对象K近邻列表更新的次数$count$,当$count < \delta KN $时终止发生,其中$\delta$是精度参数,它粗略反应了由于提前终止允许错过的真正的K近邻的比例。
伪代码
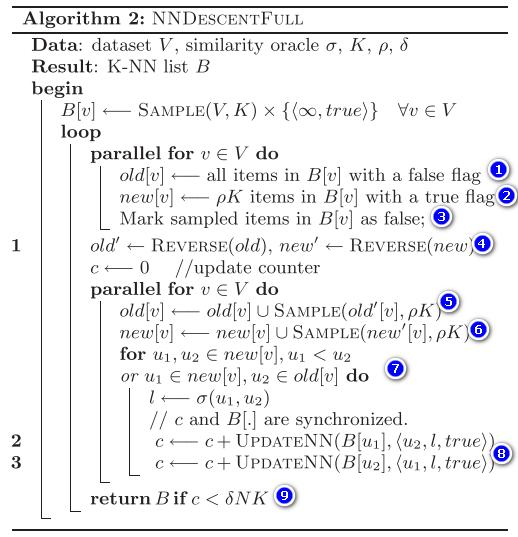
注解:算法2是在算法1的基础上结合了四个改进(局部连接;增量搜索;采样;提前终止),注意算法2其实也不能完全避免冗余计算,先理解一下这个算法,然后我会给出示例。
(1)、(2)属于增量搜索和采样部分,对于当前对象$v$,在它的邻居列表中取$\rho K$个标记为true的邻居到$new[v]$,并将这些邻居标记为false(对于伪代码中的(3)),在它的邻居列表中取出所有标记为false的邻居到$old[v]$。
(4)是取$v$的反向邻居,正如取$v$的$old[v]$一样,其它所有点也会取各自的$old$,以所有点的$old$集合中包含的点作为探索范围,检查它们的邻居列表中含$v$的点,含$v$则加入到$old^\prime [v]$,$old^\prime [v]$的意义是:点$v$的反向邻居,且在该反向邻居的邻居表中,$v$被标记为false。$new^\prime$同理。
(5)是说最后参与局部连接的$old[v]$是由两部分组成:一部分是从$v$的邻居列表中取出的标记为false的邻居集,另一部分是从$old^\prime [v]$中取样的$\rho K$个点。最后参与局部连接的$new[v]$同理((6))。
(7)表示局部连接。$new[v]$里面的点相互之间进行局部连接,为防止重复比较,设定比较顺序。$new[v]$中的点与$old[v]$中的点进行局部连接。
(8)统计更新,某一对象的邻居列表更新时,新插入的对象标记为true(满足:增量搜索)。
(9)为终止条件。当更新量小于某一阈值时终止。
冗余计算示例
如图3所示,第一次迭代时$v_3$和$v_4$都取样了$v_1$,都没有取样$v_2$,因此,它们的邻居列表中$v_1$都标记为false,$v_2$都标记为true。此时,$new^\prime[v_1]$含$v_3$、$v_4$,若$v_3$、$v_4$都被取样加入到参与局部连接的$new[v_1]$,则$v_3$和$v_4$会进行一次相似性计算。第二次迭代时,$v_3$和$v_4$都取样了$v_2$,然后$v_2$在它们的列表中被标记为false。此时,$new^\prime[v_2]$含$v_3$、$v_4$,若$v_3$、$v_4$都被取样加入到参与局部连接的$new[v_2]$,则$v_3$和$v_4$又会进行一次相似性计算。
当然,上述分两次迭代的说明也可在一次迭代中发生。不过,上述冗余计算的情况在取样过程的参与下发生的概率是很小的。
论文的创新点
一种新的构建K近邻图的方法,具体创新包括:
- 对于一个随机K近邻图,通过几次迭代而不断的完善K近邻图,最终得到一个更好的K近邻图。(构图思路)
- 处理某个点时,在该点的各邻居之间进行选边。这种方式相较于处理某个点时,该点与该点的邻居的邻居之间进行选边而言,局部性更好。两种方式实现的结果都是一样的。(选边策略)
论文的结论
具体实验分析可以看作者的原文。本文提出的NN-Descent方法可使用任意度量方式构建的K近邻图。经验复杂度为$O(n^{1.14})$,很容易实现并行化。
我的观点或思考
本文一开始是随机构建一个K近邻图,这样做的优点是简单快速。但是,迭代的过程过多地依赖随机初始化的K近邻图,这样可能不够稳定,某些情况下只需几次迭代,而另一些情况则可能需要很多。因此,一个简单地改进可从初始化K近邻图这个角度入手。
最近提出的基于近邻图的近似最近邻搜索算法——NSG和NSSG,他们在构建索引时,第一步构建K近邻图与第二部MRNG或SSG选边策略是分开进行的,有没有可能在K近邻图构建的同时执行某一选边策略。
选边的时候将三角不等式考虑进去,从而避免一些不必要的计算。

